No reviews yet, be the first to leave a review.
Liebherr Group Robot vision technology packages - LHRobotics.Vision Pricing & Product Details
Ranked Nr. 30 of 85 Robot Software

Robot vision technology packages - LHRobotics.Vision Overview
What is Robot vision technology packages - LHRobotics.Vision?
Liebherr is making its expertise in the field of industrial robot vision applications available to a wide user group with the LHRobotics.Vision technology packages
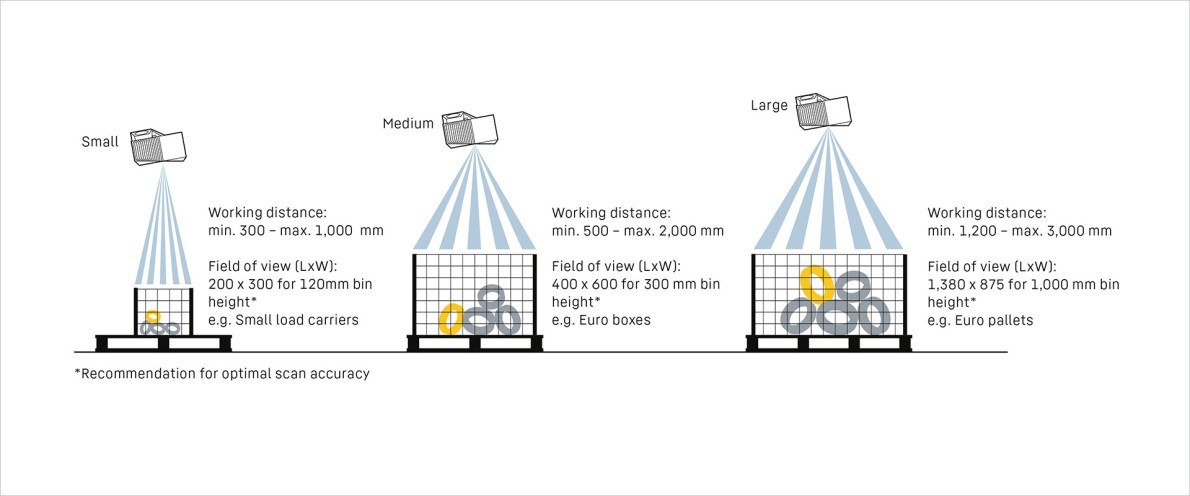
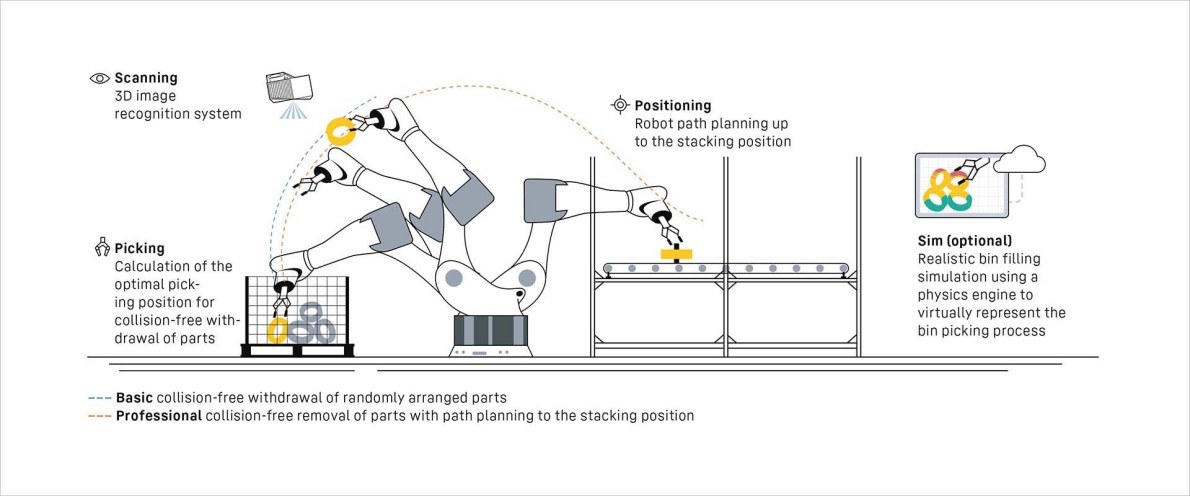
The technology packages consist of a projector-based vision camera system for optical data collection and software for object identification and selection, collision-free withdrawal of parts, and robot path planning to the stacking point.
Software
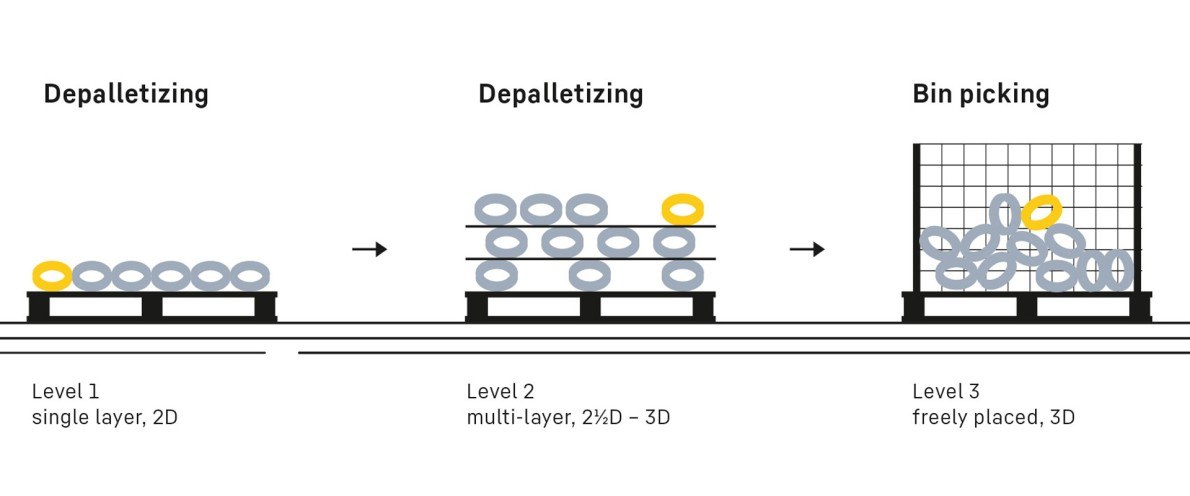
Basic license:suitable for customers who only need to roughly set the gripped workpiece down. Path planning is not necessarily required for this. Due to the lack of robot model and obstacles, it is also suitable for customers who place less value on collision checking outside the bin, for example in cases where the gripper is never able to fully enter the bin.
Pro license:
The professional license offers unrestricted use of the LHRobotics.Vision software. This license is particularly suitable for customers who place value on full collision checking of the path from removal to possible stacking
Smart bin-picking software
Design a complex application without any programming knowledge at all. LHRobotics.Vision makes it possible. The intuitive graphical user interface enables quick entry of all necessary information using simple steps, starting with:
- Attaching workpieces
- Configuration of transport containers
- Models can be created directly in the software for simple geometry, or existing CAD data can be imported
Step by step to the right grip
In order to be able to realistically represent withdrawal of parts including all axis movements in the software, highly detailed grippers are created – even bendable grippers or a 7th or 8th axis can be represented. The interfering contour takes into account the current status of the gripper – open or closed. Again, existing CAD data can be accessed.
When the workpiece and gripper meet, the task is to define suitable picking positions. This can be done by visually positioning the gripper or by precisely defining the coordinates. Degrees of freedom can be tested, and even realistic removal cycles can be simulated with the LHRobotics.Vision Sim plugin. This enables the optimization of the gripper already within the software.
Integrated simulation possibilities with LHRobotics.Vision Sim
If changes are necessary, for example modified or completely new parts are to be gripped, you'll want to test in advance if it works. In our option package LHRobotics.Vision Sim, this possibility is included. As offline programming, i.e. without intervening in the running cell, the feasibility can be tested. The entire process can therefore be tested in the cell and put into operation in advance.
The environment in view
Once parts and grippers have been created, the periphery follows. The robot used is selected from the library to check the work area. Any obstacles can be taken into account:
- Input of obstacles present in the robot’s work area
- Hand-eye calibration of the system between sensor and robot
- Definition of framework conditions for collision-free withdrawal of parts
- Path planning
What are the specifications of Robot vision technology packages - LHRobotics.Vision?
| Software type |
|
Robot vision technology packages - LHRobotics.Vision Images