




No reviews yet, be the first to leave a review.
Aeon Robotics GmbH HandEffector (Robot hand - five-finger gripper) Pricing & Product Details
Ranked Nr. 522 of 235 Grippers



HandEffector (Robot hand - five-finger gripper) Overview
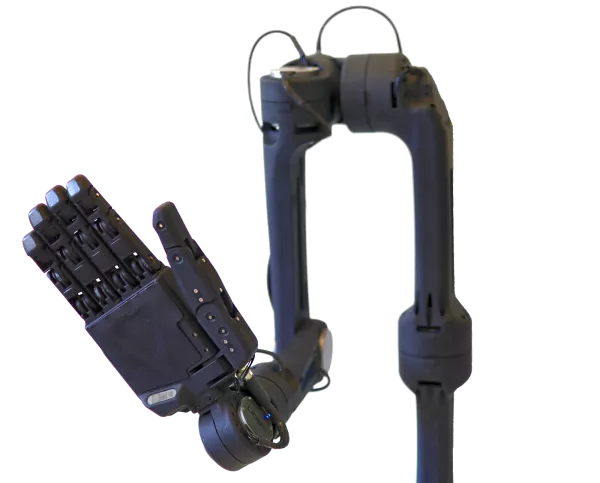
What is HandEffector (Robot hand - five-finger gripper)?
A robotic gripper designed according to the anatomy of the human hand. The quasi-direct drive technology in the HandEffector enables a depth-sensitive sense of force to be generated, which can be used to measure the force directly in the joints. In contrast to other gripping systems with linear drives or cable pull drives, external sensors can be dispensed with and a high level of measurement accuracy can be achieved. The gripper has a total of 12 electric motors and 16 degrees of freedom (2 active + 1 passive DoF per finger, 3 DoF in the thumb, 1 DoF in the wrist) in order to be able to realistically perform different types of gripping and hand movements. The built-in belt drives ensure smooth running and precision.
What applications is HandEffector (Robot hand - five-finger gripper) product best for?
Intuitive automation of processes, Intuitive teaching, application in research and development
What are the specifications of HandEffector (Robot hand - five-finger gripper)?
| Payload | 1.5 kg |