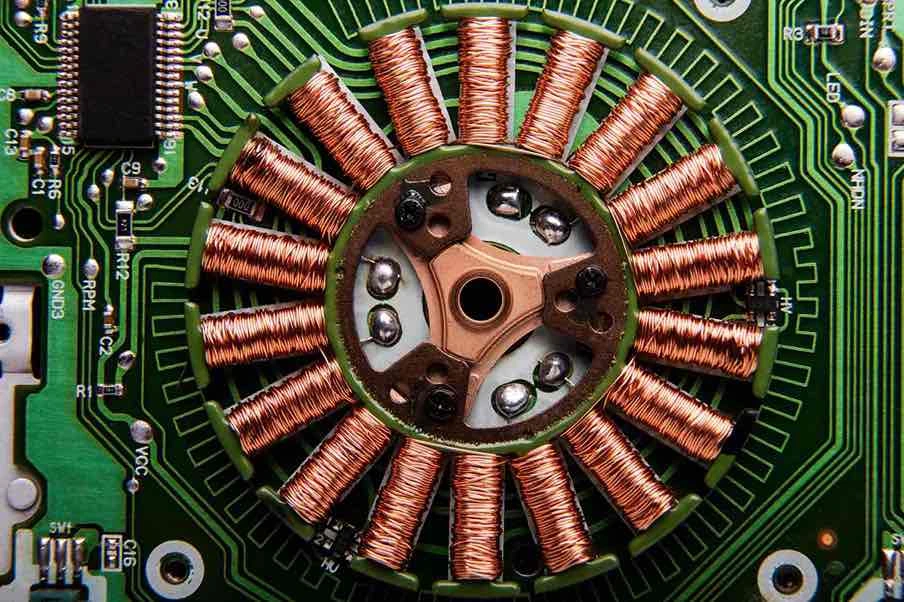
Electric motors are designed to deliver smooth and continuous rotational motion, but in practice, fluctuations in torque output are unavoidable. These variations, known as torque ripple, can affect vibration, acoustic noise, positioning accuracy, and overall motion quality. As electric motors become increasingly used in robotics, electric vehicles, and precision automation systems, reducing torque ripple has become an important consideration in both motor design and motion-control engineering.
What is Torque Ripple?
Torque ripple refers to periodic fluctuations in the torque output of an electric motor during operation. Even under constant speed and current conditions, motors rarely generate perfectly smooth torque due to electromagnetic interactions within the motor. In precision motion systems, excessive torque ripple can increase vibration and acoustic noise while reducing positioning accuracy and low-speed stability.[1]
Torque ripple is typically expressed as a percentage of average torque output:
Torque Ripple (%) = ((Tmax – Tmin) / Tavg) × 100%
Studies have shown that reducing torque ripple can significantly improve motion smoothness and reduce vibration in permanent magnet motor systems.[2]
A visual demonstration showing how torque ripple in electric motors leads to uneven rotational motion and vibration during operation.
Types of Torque Ripple
Cogging Torque
Cogging torque is caused by the interaction between permanent rotor magnets and stator slots. Unlike other forms of torque ripple, it exists even when no current is applied to the motor. Cogging torque is particularly noticeable at low speeds and can negatively affect motion smoothness in robotics and servo-driven systems.[1]
Electromagnetic Torque Ripple
Electromagnetic torque ripple occurs during powered motor operation and is commonly caused by current harmonics, magnetic field distortion, and inverter switching effects. Studies have shown that harmonic distortion can significantly increase vibration and acoustic noise in permanent magnet synchronous motors.[2]
Commutation Torque Ripple
Commutation torque ripple is common in brushless DC (BLDC) motors and occurs during phase switching. Sudden current transitions between phases can produce discontinuous torque output, particularly in six-step commutation systems.[3]
Causes of Torque Ripple in Electric Motors
Torque ripple in electric motors arises from a combination of electromagnetic and system-level effects. One of the primary sources is slotting effects, where rotor magnets interact with stator teeth, creating periodic variations in magnetic reluctance and torque output. Harmonic distortion from non-sinusoidal back EMF, inverter switching, and PWM control further contributes to torque fluctuations, particularly in permanent magnet motor systems where torque harmonics can significantly increase vibration and acoustic noise.[4][5]
In addition, imperfections in current control such as dead-time distortion and phase tracking errors introduce instability in torque production. Magnetic saturation under high load conditions can also lead to uneven flux distribution and nonlinear torque behavior. Mechanical factors, including rotor eccentricity, shaft misalignment, and manufacturing tolerances, amplify these effects. Torque ripple becomes especially problematic in low-speed precision applications, direct-drive systems, and high-torque servo systems where smooth motion is critical.
Effects of Torque Ripple
Torque ripple introduces several mechanical and performance limitations in precision motion systems. The most immediate effect is vibration and acoustic noise, as oscillatory torque generates periodic forces within the drivetrain. In electric vehicle drivetrains, collaborative robots, and medical systems, this leads to reduced smoothness and increased audible noise, with studies showing increases of up to 10–15 dB in low-speed operating conditions due to resonance amplification.[5]
It also reduces positioning accuracy in robotic joints, CNC machines, and semiconductor equipment by introducing micro-oscillations that degrade motion stability. In addition, torque ripple increases mechanical stress on components such as bearings, couplings, and gearboxes, accelerating wear through cyclic loading. Finally, it reduces overall efficiency by increasing control effort, thermal losses, and current regulation instability. In high-performance motion systems, even small levels of torque ripple can significantly affect smoothness and long-term reliability.
Techniques for Reducing Torque Ripple
Motor Design Improvements
Torque ripple can be significantly reduced through structural motor design optimisation. Skewed rotor or stator slots help smooth magnetic alignment between rotor and stator, reducing cogging torque and improving torque uniformity. Optimised magnet geometries, such as segmented or chamfered designs, improve flux distribution in the air gap and reduce harmonic distortion. Fractional slot windings further reduce spatial harmonics by improving electromagnetic symmetry and lowering torque pulsations.[1]
Advanced Motor Control Techniques
Field-Oriented Control (FOC) enables sinusoidal current regulation, resulting in smoother torque production and improved dynamic response in robotics and electric vehicle systems.[3] Space Vector PWM (SVPWM) reduces inverter switching harmonics by improving voltage utilisation, which directly lowers torque ripple components.[4] Harmonic compensation techniques actively inject corrective currents to cancel ripple-producing harmonics in real time. Model Predictive Control (MPC) further enhances performance by predicting torque behaviour and optimising control inputs before disturbances propagate.[2]
Conclusion
Torque ripple is an inherent characteristic of electric motors, driven by electromagnetic interactions, control limitations, and mechanical imperfections. While it cannot be fully eliminated, it can be significantly reduced through optimised motor design and advanced control strategies such as FOC, SVPWM, and predictive control. As demand for high-precision motion systems continues to grow in robotics, electric vehicles, and industrial automation, managing torque ripple is essential for improving smoothness, efficiency, and long-term system reliability in modern electric drive applications.
References
- Kollmorgen. (n.d.). Everywhere Cogging Torque and Torque Ripple: What You Need to Know. Retrieved May 8, 2026, from https://www.kollmorgen.com/en-us/blogs/everywhere-cogging-torque-and-torque-ripple-what-you-need-to-know
- MDPI. (n.d.). Torque Ripple Reduction of Interior Permanent Magnet Synchronous Motor Using Harmonic Injected Current. Retrieved May 10, 2026, from https://www.mdpi.com/2673-4117/3/4/44
- SOLO Motor Controllers. (n.d.). Torque Ripple in Electric Motors. Retrieved May 9, 2026, from https://www.solomotorcontrollers.com/blog/torque-ripple/
- MDPI Energies. (n.d.). Analysis of Torque Ripple and Harmonic Effects in Motor Drives. Retrieved May 8, 2026, from https://www.mdpi.com/1996-1073/14/6/1713
- MDPI Energies. (n.d.). Current Harmonics and Acoustic Noise Reduction in PMSM Drives. Retrieved May 8, 2026, from https://www.mdpi.com/1996-1073/13/10/2534

Digital Twins in Robotics: 5 Things to Know
Robot digital twins are transforming the way robots are built, programmed, and maintained, and they [...]
Jun

Top 6 CNC Machine Trade Shows 2026
We’re halfway through 2026, and the most important CNC machine trade shows are still ahead. [...]
Jun

What is Time Sensitive Networking?
In modern manufacturing, robots, sensors, and motion control devices must be in total harmony with [...]
1 Comments
May
Torque Ripple in Electric Motors
Electric motors are designed to deliver smooth and continuous rotational motion, but in practice, fluctuations [...]
May

Series Elastic Actuators Explained
If engineers are building or deploying robots that operate around people, actuator selection becomes a [...]
Apr
Mobile Robot Battery: Swappable vs. Fast-Charge
Every minute a mobile robot spends off the floor is a minute of lost productivity. [...]
Apr