










Irene Yang
University of Edinburgh
Aug 10, 2023
Period
- 2022
Testimonial
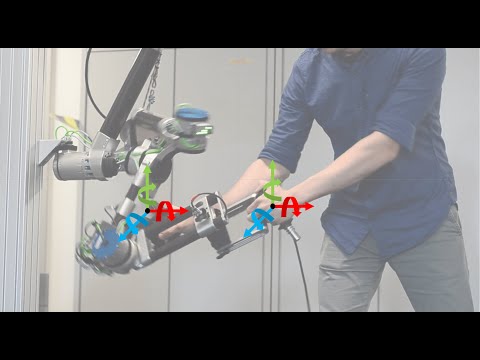
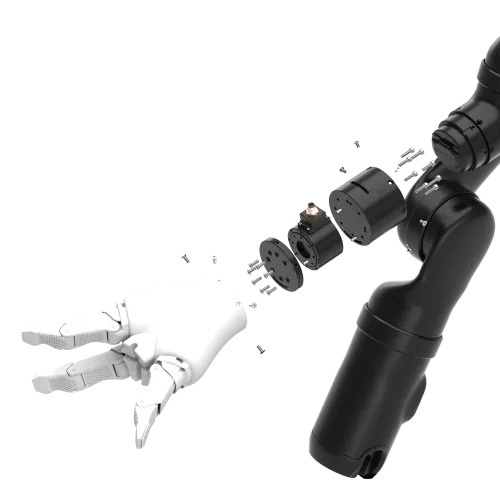
I work as a postdoctoral research fellow in orthopaedic engineering. I have built a custom rig that I was then looking for a multi-axial load cell that was affordable and that was easy to use. A fellow researcher in robotics recommended that I get in touch with BOTA Systems, a robotics company that also focuses on force sensing applications. I was immediately contacted by a BOTA representative, who promptly briefed me on a great range of load cells. They also met with me multiple times to help integrate the BOTA Medusa multi-axial load cell with my rig and existing code, custom design all required accessories. I was incredibly impressed with the "ease of use" of the highly integrated product, accessories, software and customer support, the incredible value for money and would highly recommend BOTA Systems force sensors and the team.
Anonymous user
Mar 2, 2023
Period
- 2021
Title
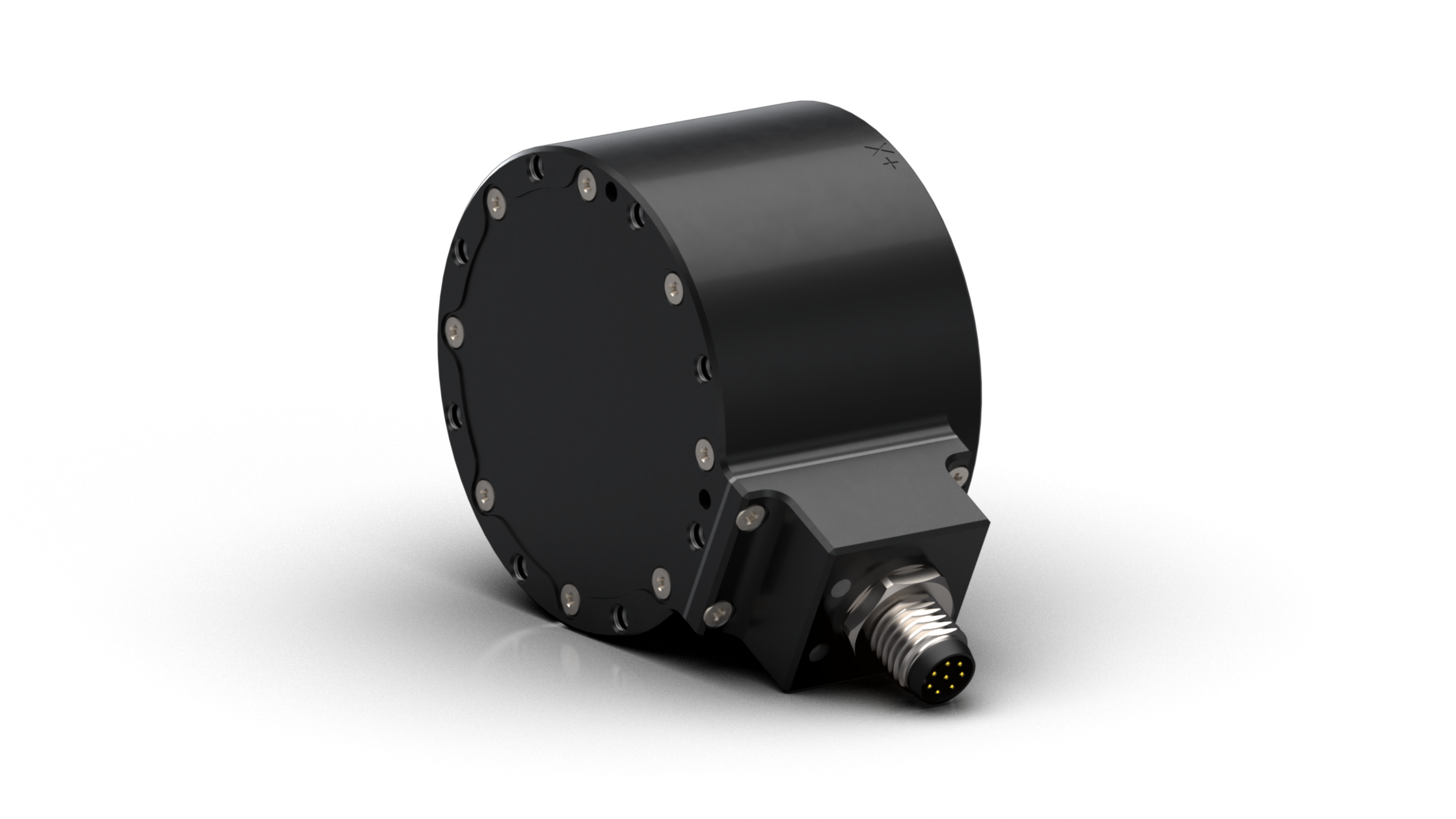
I used this sensor in a custom-built testbed for measuring wheel-soil interaction forces.
Pro
The sensor was easy to mount and use, and support from the team was excellent when I had software issues. It was easy to use the sensor with ROS, and the data quality was very good.
Con
The sensor takes 30-45 minutes to warm up to a steady temperature, and force measurements drift with temp, so you have to turn on the machine well in advance of data collection. The cable that came with our sensor was also fragile and needed to have strain relief added.