qbrobotics QB SOFTHAND RESEARCH Specifications
Ranked Nr. 37 of 235 Grippers

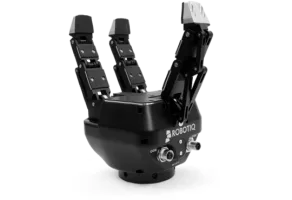
The qb SoftHand Research by qbrobotics stands out for its adaptability and exceptional grasping capabilities, setting a benchmark for simplicity and flexibility in robotic manipulation. This hand is designed with unique features that emphasize its adaptability and robustness. With 19 anthropomorphic DOFs, one synergy, and one motor, the hand offers remarkable flexibility, allowing it to grasp various objects without necessitating control action changes. The self-healing finger joints further enhance its durability, providing longevity and resilience in real-world applications.
The qb SoftHand Research exhibits impressive specifications that make it versatile and functional. Its grasp force of 62N in the pinch configuration and a nominal payload of 1.7kg add to its capability to handle a range of objects effectively. The hand's rapid movement is also notable, transitioning from a wide-open position to a clenched fist in just 1.1 seconds. The inclusion of USB and RS485 interfaces, along with ROS compatibility, simplifies integration into various robotic systems. Weighing 500g and offering feedback on motor position and motor current, the qb SoftHand Research presents a lightweight yet powerful option for research and industrial applications.
A lesser-known but significant aspect of the qb SoftHand Research is its dislocatable and self-healing finger joints. This unique feature contributes to the hand's adaptability and robustness, allowing it to maintain its functionality even in situations where traditional designs might encounter challenges. This innovative approach makes the qb SoftHand Research an attractive choice for applications that demand reliability and versatility in robotic manipulation.
| Industry |
|
| Payload | 1.7 kg |
| Gripper mass | 0.5 kg |
| Closing time | 1.1 s |
| Operation type |
|
| Max. Force | 62 N |
| Application |
|