RoboDK RoboDK Specifications
Ranked Nr. 6 of 85 Robot Software

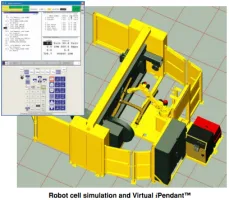
RoboDK is a comprehensive robotic simulation and programming software that offers a user-friendly experience with five easy steps to simulate and program robots. It provides access to an extensive library of over 500 industrial robot arms from various manufacturers like ABB, Fanuc, KUKA, and Universal Robots. Moreover, it supports external axes such as turntables and linear rails, allowing users to model and synchronize additional axes effortlessly.
The software facilitates precise tool definition by loading 3D models of tools and converting them to robot tools by drag-and-drop actions. Users can calibrate robot tools accurately using RoboDK. Additionally, it enables the loading of 3D models of parts and placing them in a reference frame for a quick proof of concept. The simulation capabilities enable users to create robot paths using an intuitive interface, integrating with CAD/CAM software and accessing plug-ins for various design software.
RoboDK's standout feature lies in its ability to generate robot programs offline with just two clicks, supporting over 40 robot manufacturers with more than 70 post-processors. It eliminates the need for programming experience, making it accessible to a broader user base. Furthermore, it automatically generates error-free paths, avoids singularities, axis limits, and collisions, ensuring efficient and collision-free robot programming. The software's capability to split long programs enables easy loading into the robot controller, streamlining the programming process for industrial automation tasks.
| Application |
|
| Industry |
|
| Software type |
|
| Type |
|
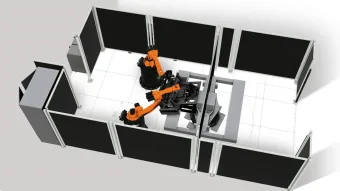
| Extra info | Offline Programming (or Off-Line Programming) means programming robots outside the production environment. Offline Programming eliminates production downtime caused by shopfloor programming. Simulation and Offline Programming allows studying multiple scenarios of a robot work cell before setting up the production cell. Mistakes commonly made in designing a work cell can be predicted in time. |