Coppelia Robotics CoppeliaSim Specifications
Ranked Nr. 19 of 85 Robot Software

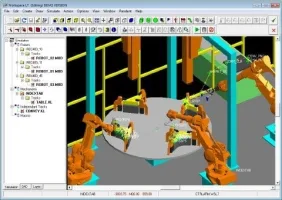
Coppelia Robotics' CoppeliaSim is a leading robotics simulator known for its distributed control architecture, granting individual control over objects through embedded scripts, plugins, ROS nodes, and custom solutions. This unique versatility makes it an ideal choice for multi-robot applications, allowing developers to write controllers in C/C++, Python, Java, Lua, Matlab, or Octave, catering to diverse programming preferences. The simulator finds extensive application in fast algorithm development, factory automation simulations, prototyping, robotics education, remote monitoring, safety validation, digital twin simulations, and more.
CoppeliaSim's standout features include its Remote API, enabling seamless communication with external applications. Its support for multiple physics engines, such as Newton dynamics, vortex studio, and Bullet physics library, ensures accurate and realistic simulations. Additionally, it offers capabilities like inverse and forward kinematics calculations, motion planning with the OMPL library, sensor simulation (including proximity and vision sensors), and importing/exporting videos, images, mesh data, and text in various formats. The platform's data visualization and recording capabilities, collision detection, customizable dynamic particles, and building block concept further enhance its appeal as a comprehensive tool for research, development, and testing in robotics.
| Application |
|
| Industry |
|
| Software type |
|
| Type |
|